Беспроводное устройство для мониторинга ЭКГ с возможностью сбора и анализа полученных данных SAFEHEАRT
SAFEHEART – это носимое электронное устройство, позволяющее определять предынфарктное состояние, отслеживать динамику аритмии и многое другое.
Возможности устройства:
- Определение типа физической активности человека
- Отслеживание динамики аритмии в течение длительного периода времени
- Помощь врачу в диагностике заболеваний на ранней стадии
- Удаленная связь с лечащим врачом

Как это работает?
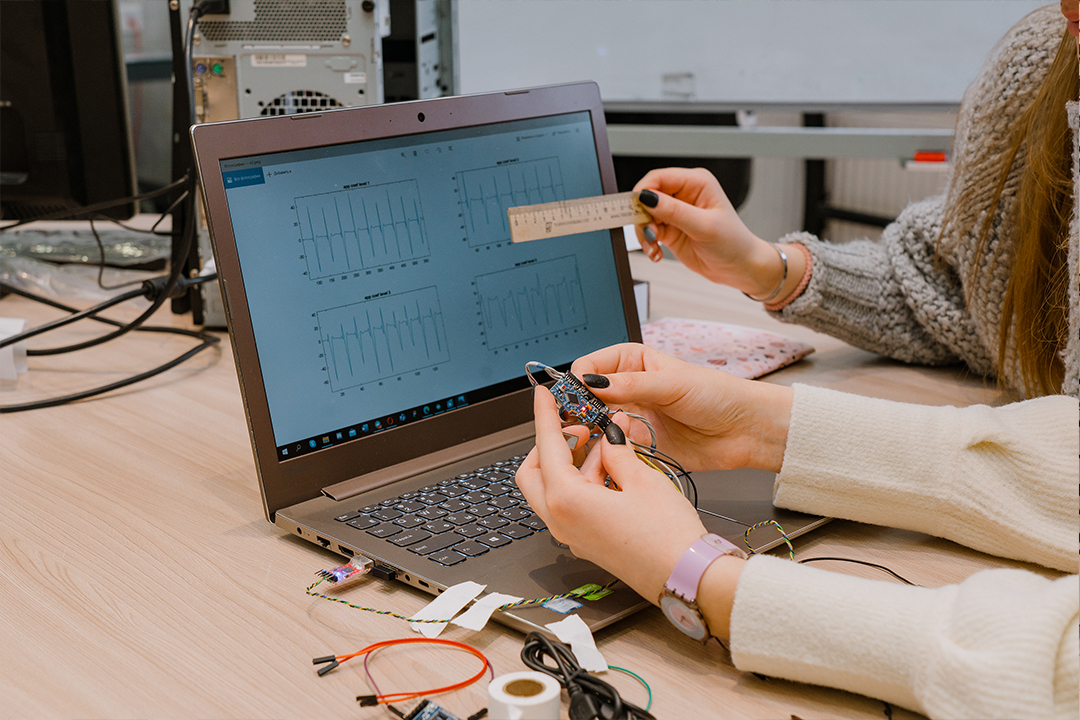
- Электродный пластырь (первичная обработка)
- Вторичный анализ данных и передача информации в приложение на телефон
- Своевременная помощь и накопление данных за длительный период времени
Команда проекта:
- Малышева Вероника (Руководитель проекта, инженер, дизайнер)
- Стош Алена (Инженер, биолог)
- Черепенников Григорий (Инженер, программист)
- Зайнуллина Диана (Программист, технолог)
Браслет-манипулятор для управления объектами в VR/AR NEUROBI
NEUROBI – устройство, которое с помощью жестов и движений руки позволяет управлять коллаборативными роботами с помощью анализа состояния мышц руки.
Основные возможности:
- Управление роботом за счёт копирования траектории руки
- Управление роботом с помощью жестов
- Упрощение процесса задания траектории
Система TREMORO
TREMORO – платформа для сбора данных по болезни Паркинсона, необходимых для контроля протекания болезни, наиболее точного выявления и многого другого.
Основной функционал:
- Сбор данных (видео, тесты и тд)
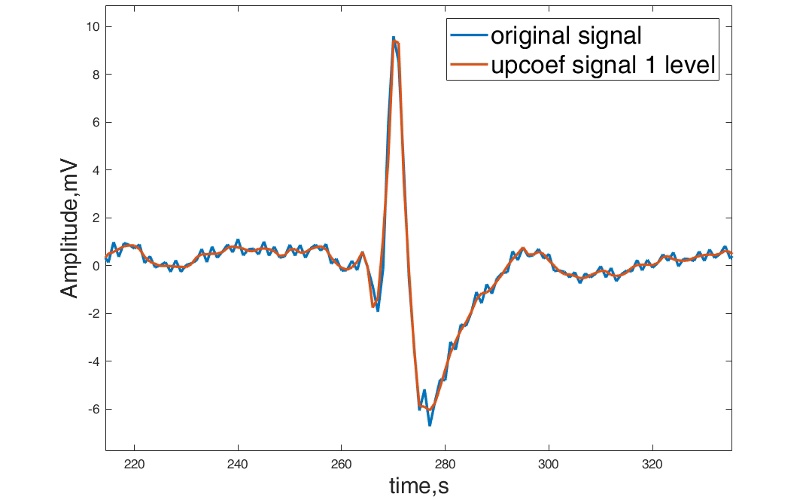
- Анализ видео + анализ данных со смартфона
- Помощь врачам в анализе результатов